When many RF remotes share the same channel, reliability depends on how the system handles shared spectrum, interference, timing, hidden terminals, acknowledgments, and recovery.
Reading mapArticle sections11 sections
The wireless link is inherently shared. Shared means contested, and contested means collisions.
Picture a smart home showroom. Dozens of RF remotes are operating at the same time: someone adjusting lights, someone closing blinds, someone controlling air conditioning, and someone opening the garage door. On the surface, everything runs smoothly.
But in the invisible spectrum overhead, multiple devices are competing for the same slice of airspace. This is one of the most fundamental problems in RF systems: the wireless link is shared, and once a channel is shared, competition and collision become part of the design problem.
RF remote control is used everywhere, including consumer electronics, industrial control, access systems, automotive, and specialty remote applications, because it is low cost, power efficient, easy to deploy, and does not require line of sight. But the moment multiple devices share the same frequency band, the channel stops being a simple transmitter-and-receiver arrangement and becomes a resource contention system.
What a Collision Actually Is
Wireless communication is not a single beam of signal flying through the air. Many electromagnetic waves can propagate and overlap in the same space at the same time. What the receiver receives is the combined result of the target signal, other transmissions, and environmental noise.
If the target signal power is S, interference power is I, and noise power is N, received signal quality can be expressed as SINR = S / (I + N). When interference is strong enough, or when multiple signals overlap in time and frequency, SINR drops below the demodulation threshold.
The result is bit errors, dropped frames, or a complete failure to recover the data. In the final product, this may look like a remote that sometimes works and sometimes does not.

- Same-frequency, same-time collision: two devices transmit on the same carrier frequency at nearly the same moment. This is the most direct and common form.
- Adjacent-channel interference or out-of-band leakage: two devices are not on exactly the same center frequency, but imperfect transmit spectra, receiver filters, or dynamic range still allow interference.
- Hidden-terminal collision: device A and device B cannot hear each other, but both can reach receiver C. They collide at C without either knowing the other exists.
Consumer Remotes and Industrial Remotes Have Different Collision Tolerances
Same category of device, radically different requirements. In a home setting, if a 433 MHz remote does not respond to a button press, the user presses again. The collision has a cost, but that cost is usually a minor annoyance.
In industrial control, the situation is entirely different. For tower cranes, hoists, mining equipment, or large gate systems, a dropped control frame is not just operational inconvenience. It can mean delayed response, state desynchronization, or genuine safety risk.
That is why consumer RF systems often optimize for low cost, low power, and acceptable success rates, while industrial RF systems prioritize determinism, reliability, acknowledgment mechanisms, and fail-safe behavior.
Collision Avoidance Is Resource Partitioning
There are many named techniques in this space, but they all answer the same underlying question: how do you stop multiple devices from stepping on the same resource at the same time?
- Divide by frequency: FDMA.
- Divide by time: TDMA.
- Evade by hopping: FHSS.
- Absorb by spreading: DSSS.
- Yield by listening: CSMA/CA.
FDMA Assigns Different Frequency Slots
Frequency Division Multiple Access is the most intuitive approach: assign different devices to different frequencies so they do not overlap.
Within the 433.05 to 434.79 MHz sub-band common in Europe, for example, it is theoretically possible to carve out multiple narrowband channels. In real designs, guard intervals, modulation bandwidth, spurious emissions, regulatory duty cycle limits, and receiver behavior reduce the number of usable concurrent channels.
FDMA is simple, stable, and predictable. Its limits are also clear: spectrum efficiency is low, scaling is inflexible, and the number of available frequency slots is finite.
TDMA Assigns Different Time Slots
Time Division Multiple Access slices the shared channel by time. All devices use the same frequency, but each transmits in an assigned window. If synchronization is tight enough, two nodes should not transmit at the same moment.
TDMA gives determinism. Behavior is predictable and latency can be controlled, which makes it suitable when timing guarantees matter.
The real engineering challenge is synchronization. Low-cost RF devices use crystals that drift with temperature and age. Without periodic re-synchronization, adjacent slots can start bleeding into each other and the schedule turns back into collisions.
FHSS Compresses Collisions into Brief Events
Frequency Hopping Spread Spectrum never stays in one place long enough to be reliably disrupted. Transmitter and receiver follow the same pseudo-random hopping sequence, moving across frequency slots in rapid succession.
If interference or collision happens on one channel, the effect is limited to that dwell period instead of suppressing the entire link. Adaptive frequency hopping improves this by reducing use of heavily interfered channels.
The cost is complexity. Transmitter and receiver must maintain matched hopping sequences and synchronization, which is much more involved than a simple single-frequency remote.
DSSS Trades Bandwidth for Robustness
Direct Sequence Spread Spectrum spreads narrow data across a wider spectrum using a pseudo-random spreading code. The receiver uses the same code to de-spread the target signal and dilute unrelated interference.
This is a bandwidth-for-robustness trade. DSSS gives strong resistance to narrowband interference and can support code division multiplexing, but it consumes more bandwidth and increases implementation complexity.
CSMA/CA Listens Before Transmitting
Carrier Sense Multiple Access with Collision Avoidance is often practical when node counts are dynamic or devices cannot be assigned fixed frequency slots or time windows.
The core logic is simple: monitor the channel first. If the channel is busy, wait. If it is clear, wait a random backoff period before transmitting. If no acknowledgment arrives, wait longer before retrying.
CSMA/CA is flexible and distributed, but under heavy traffic, efficiency drops and latency becomes unpredictable. It also does not inherently solve the hidden terminal problem.
The Real Engineering Work Is the Trade-Off
Real RF system design almost never has a perfect collision avoidance answer. The difficulty is in the trade-offs.
If low latency and determinism are the priority, scheduled approaches like TDMA offer more. If flexible deployment and dynamic node counts matter more, contention-based mechanisms like CSMA/CA are usually more practical.
For small device counts, simple frequency or time division is often enough. As device density increases and interference grows heavier, frequency hopping, acknowledgment and retransmission, shorter packets, and adaptive link management become more important.
Battery-powered devices add another layer of difficulty. Low-power endpoints do not want to maintain active listening and synchronization for extended periods, but many collision avoidance mechanisms require exactly that. The answer is often a combination of beacon-based scheduling, short packet formats, event-driven wake-up, and low duty cycle operation.
How RF Remote Systems Evolved from 433 MHz to 2.4 GHz
Early 433 MHz remote designs were structurally simple. Their main goal was to transmit a signal and have it recognized. They typically included basic encoding and address matching but had little real concurrent access control.
Rolling code later became standard in garage doors and car keys, substantially improving security by addressing replay attacks. But rolling code is not collision avoidance. Security mechanisms and concurrency mechanisms are separate problems.
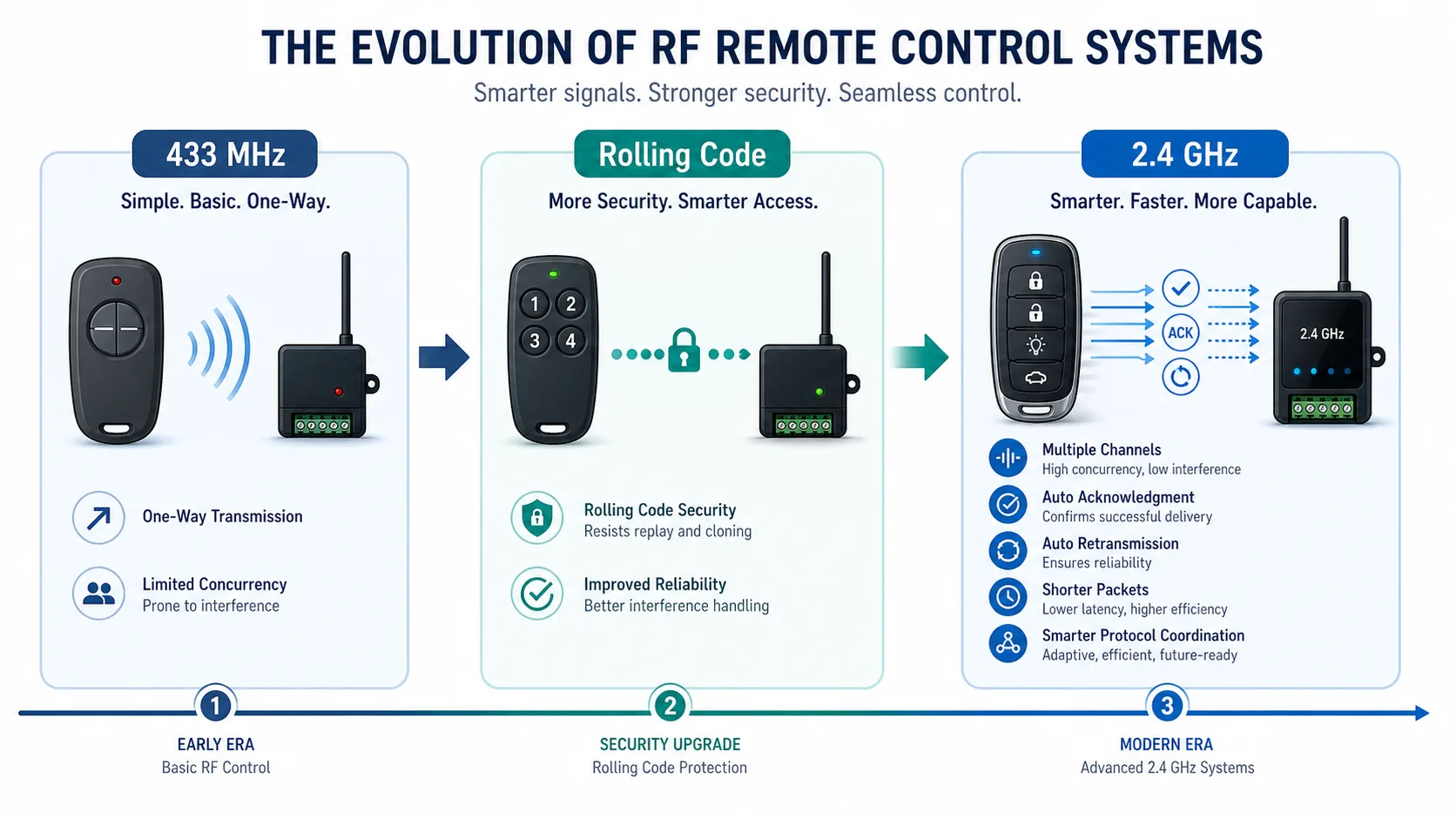
The move toward 2.4 GHz systems brought more protocol capability: multiple channels, automatic acknowledgment, automatic retransmission, shorter over-the-air packet duration, and more mature coordination. These systems do not win by being louder. They win by compressing the collision window and recovering faster.
Looking ahead, collision avoidance is moving from reactive recovery toward proactive spectrum management: sensing spectrum conditions in advance, dynamically selecting better parameters, and avoiding interference hotspots before they become failures.
Collision Avoidance Builds Order in Chaos
The concurrency and collision problem in RF remote systems is fundamentally about establishing as much order as possible inside an open, shared, and incompletely predictable electromagnetic space.
Frequency division, time division, frequency hopping, spread spectrum, and listen-before-talk are not universal answers. Each method is an engineering compromise shaped by cost, power budget, spectrum availability, reliability requirements, and latency targets.
Mature RF systems do not bet everything on a single technique. They coordinate physical layer, link layer, and application layer decisions: channel planning, packet size, acknowledgments, retransmission, collision recovery, power control, latency, and security.
Understanding that is what it means to understand RF collision avoidance. It was never just a communication trick. It is a complete methodology for managing shared resources and the tradeoffs that come with them.
During RF remote control sourcing or product development, have you met problems where several remotes worked individually but became unstable together? Was it same-frequency collision, adjacent-channel interference, a hidden-terminal situation, or simply a protocol that did not leave enough recovery margin?
About the Author
Eric Huang
RF Remote Controls & Controllers Specialist
Hi, I'm Eric Huang, with 10+ years of experience in RF remote controls and controllers. I combine technical expertise with international trade knowledge to provide businesses with reliable, high-quality solutions. My goal is to ensure every client finds a trustworthy product.
Feel free to share your thoughts or ask questions. Let's connect!
Keep reading
Related articles
Circuits Don't Act: Why I Hate "Good Enough" Transmitter Modules More and More
A transmitter module is not reliable just because it can send a signal. Real quality depends on stability, clean output, tuning margin, and repeatable mass production.
Read next OEM/ODMOEM or ODM? You Think You're Choosing a Production Method, But You're Actually Choosing Your Future
For hardware startups, OEM and ODM are not just production labels. They decide who controls the product, the certification path, and the future leverage in the supply chain.
Read next RF EngineeringBuild Your Own RF Remote Control: A Beginner's Guide to Wireless Magic
A beginner-friendly RF remote project uses a transmitter, receiver, relay module, power supply, and antenna to demonstrate how wireless control works from button press to relay click.
Read nextНужна помощь сейчас?
Отправьте нам свой вопрос по совместимости, и мы ответим напрямую.
Comments
Leave a comment or RF question
Share your unstable range, batch consistency, matching, filtering, case effect, or export production question. Eric will review the details and reply directly.
Comments are handled by email for now, so you can review the message before sending.